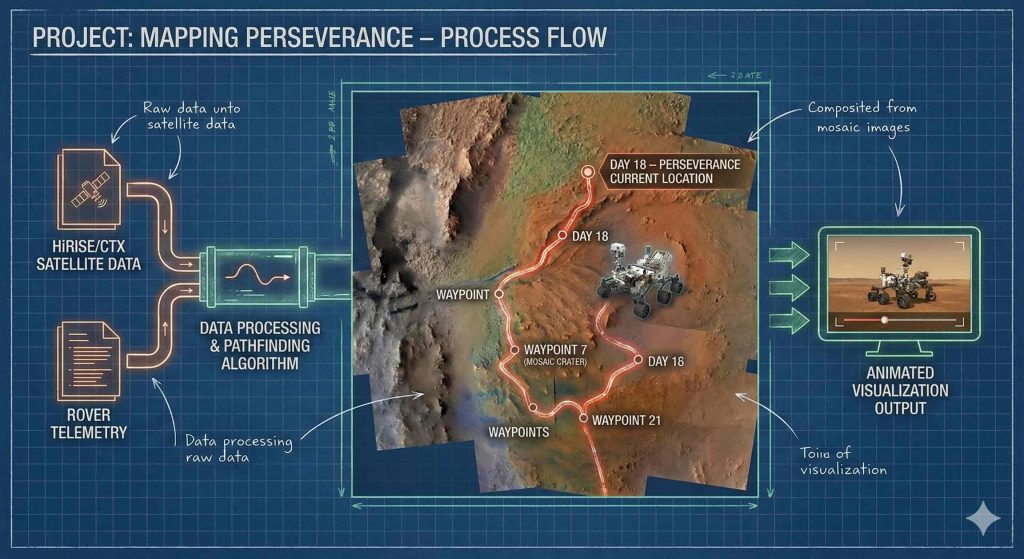
Pour le défi « Process », j’ai décidé de documenter l’ensemble du processus derrière la carte et l’animation que j’ai réalisées pour le jour 18 – Out of This World, où j’ai visualisé les déplacements du rover Perseverance sur une mosaïque HiRISE/CTX du cratère Jezero, sur Mars.
Dans cet article, je partage le processus technique du début à la fin : du téléchargement de l’ensemble de données original à l’exportation de l’animation en GIF et MP4, le tout développé en Python dans un Jupyter Notebook.
1️⃣ Données d’entrée : de la NASA au notebook Python
Source principale des données de localisation
- J’utilise le bundle officiel Mars 2020 Rover PLACES de la NASA, qui contient la localisation interpolée du rover tout au long de la mission.
- La NASA publie les positions du rover dans le « Mars 2020 Rover PLACES Bundle ». Vous y trouverez un fichier CSV appelé best_interp.csv avec les emplacements de Perseverance du soleil 0 à ~1511 (mai 2025).
- Le fichier best_interp.csv comprend :
- soleil : jour martien de la mission
- coordonnées du rover en latitude/longitude planétocentriques
- informations temporelles et de qualité de l’interpolation
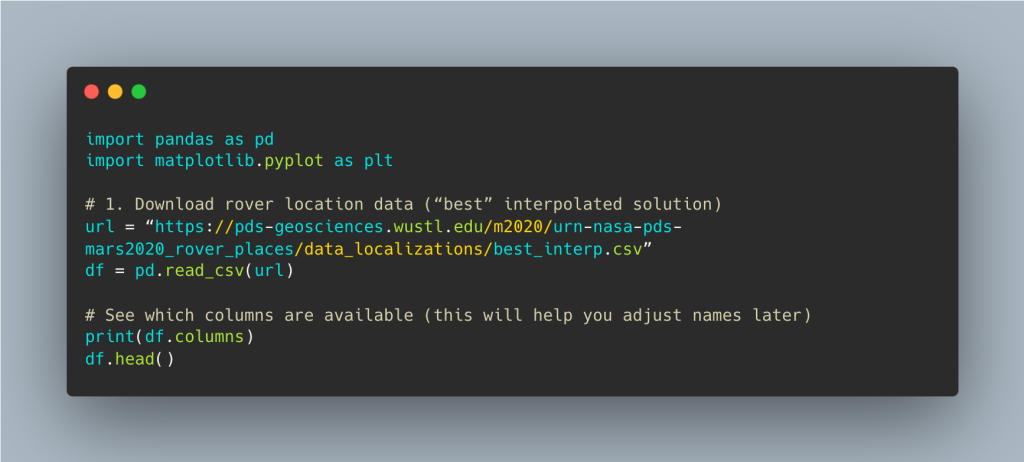
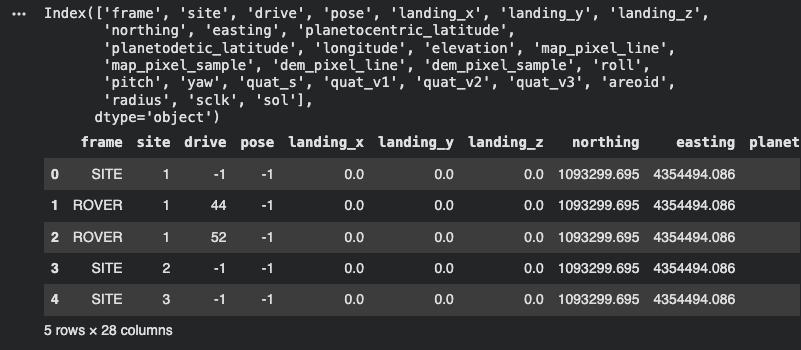
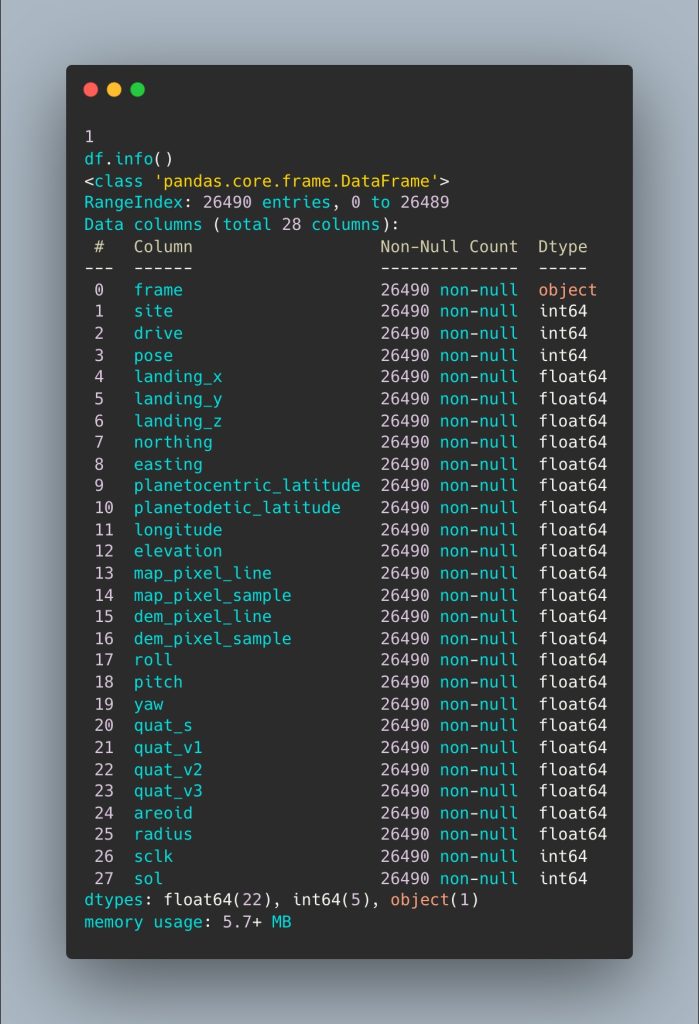
Nous obtenons toutes les informations du nouvel ensemble de données :
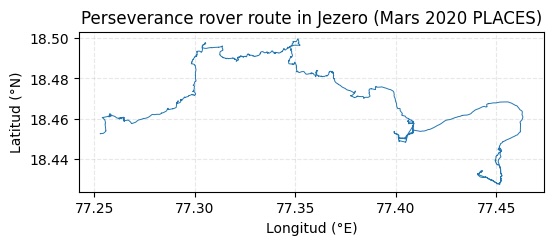
À partir de là, je sélectionne les colonnes clés pour tracer l’itinéraire et je supprime les données nulles :
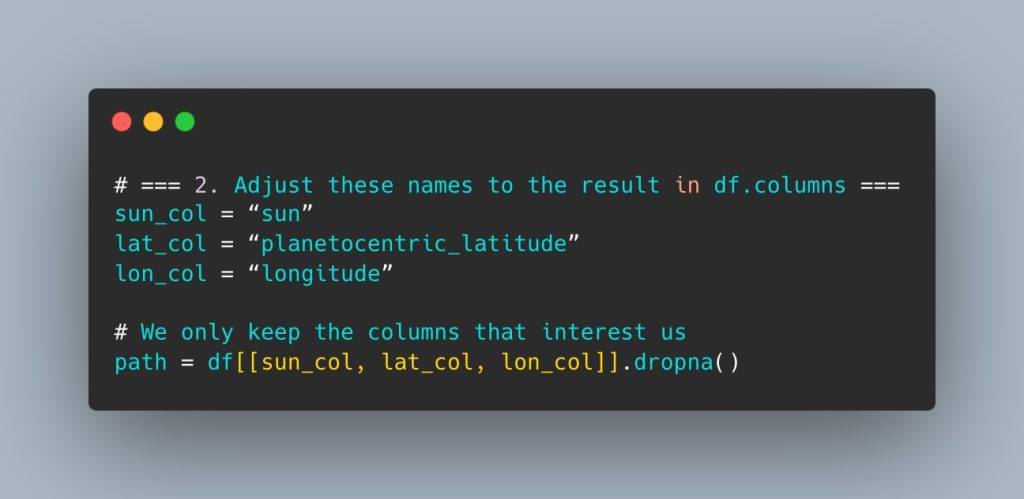
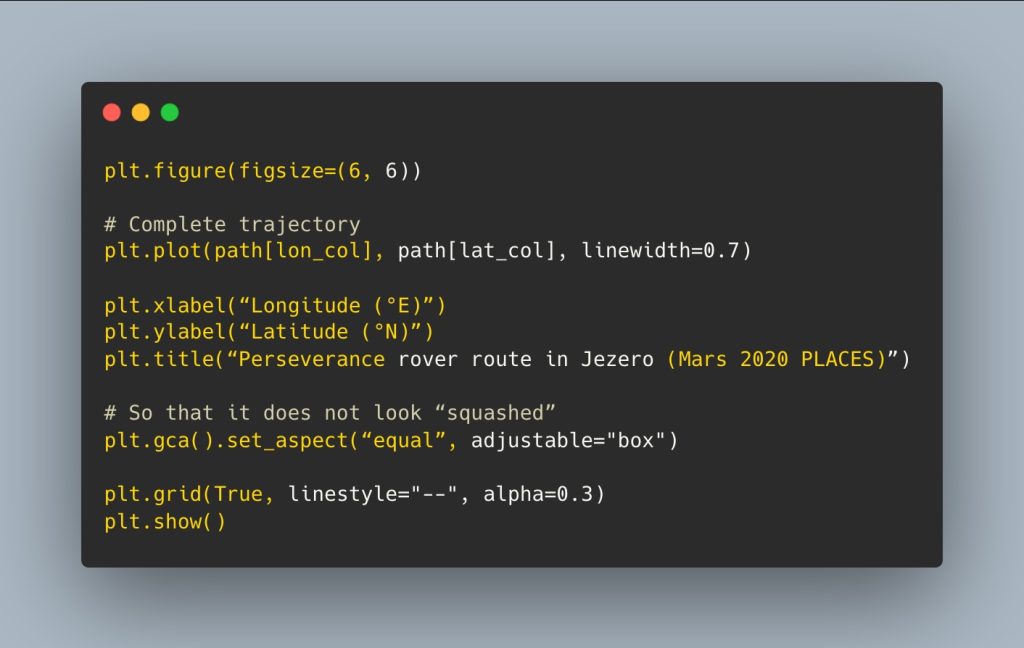
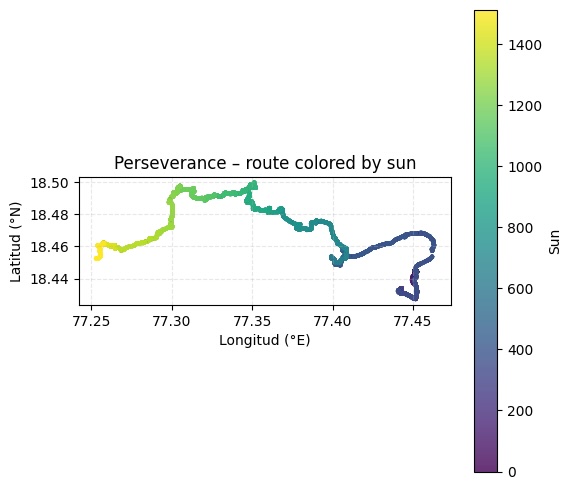
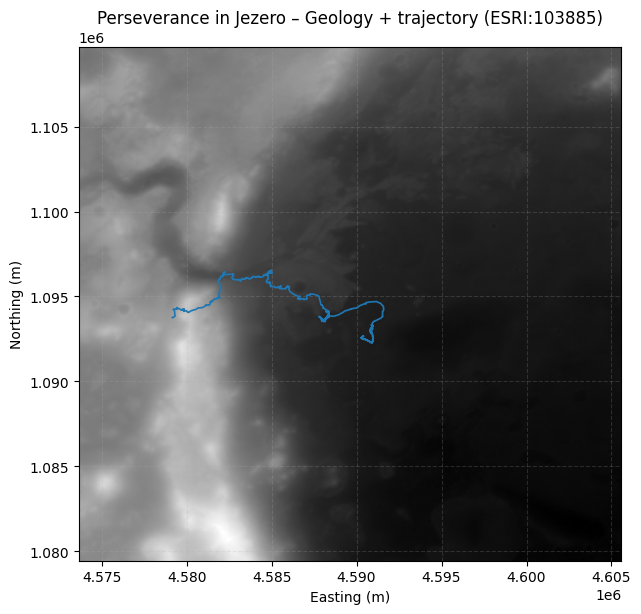
Nous obtenons la première trajectoire de Perseverance tracée depuis le jour 0 jusqu’à environ 1511 (mai 2025).
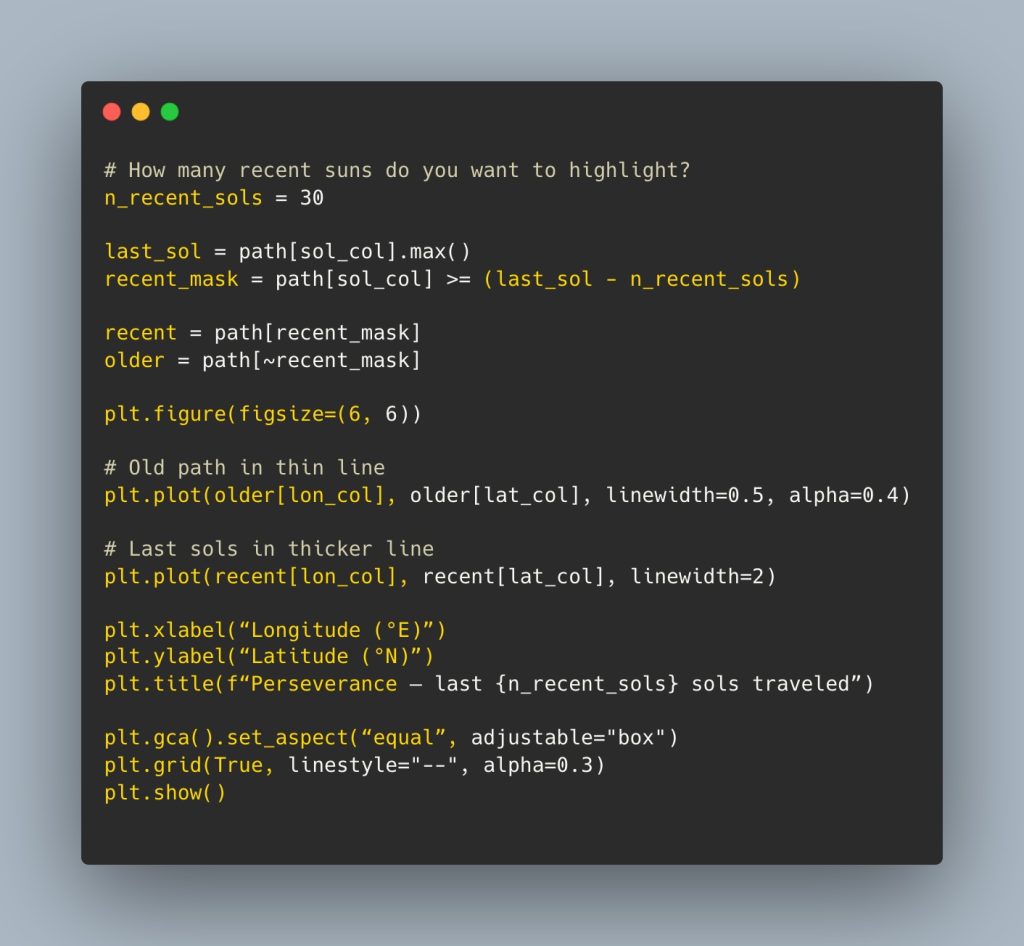
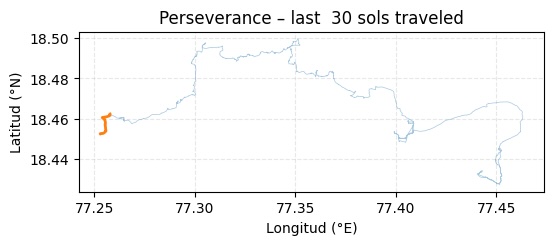
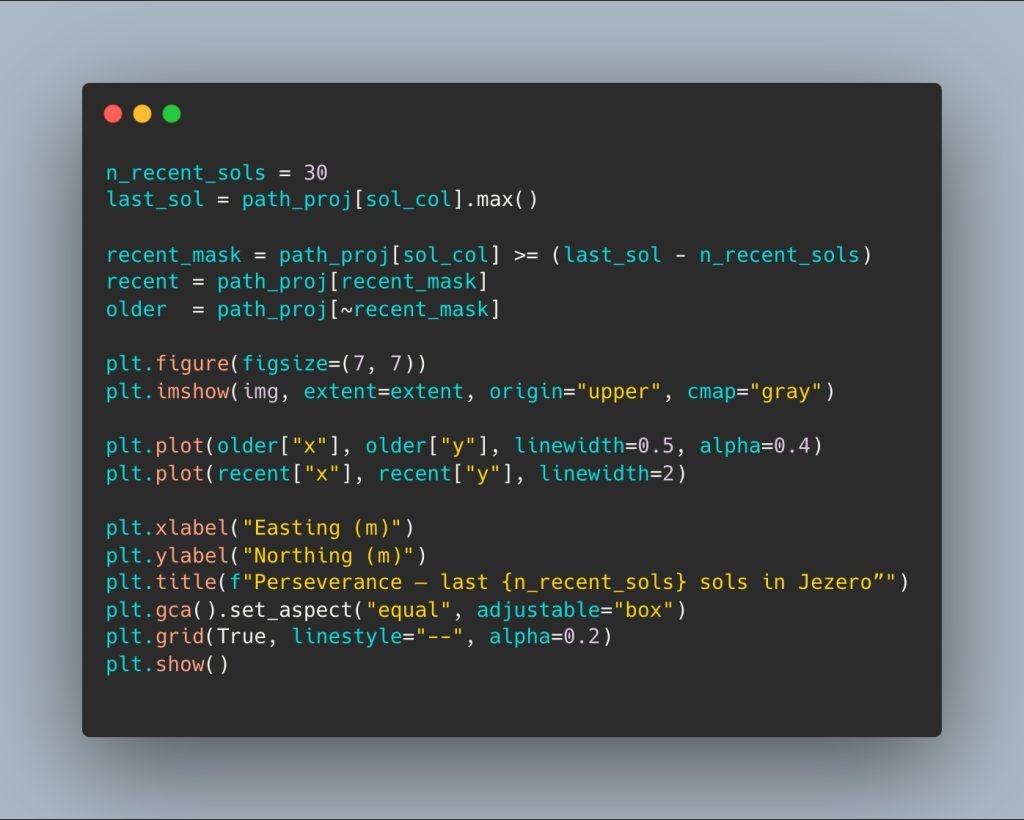
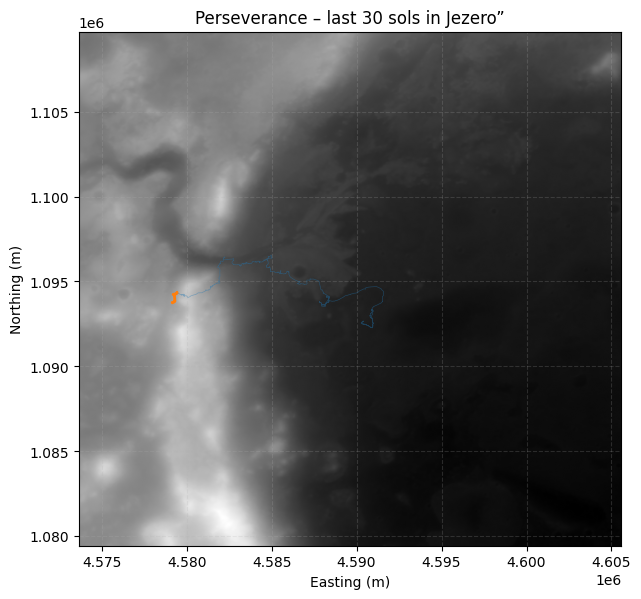
Nous pouvons maintenant décider combien de soleils récents nous voulons mettre en évidence, c’est-à-dire que nous pouvons obtenir visuellement le parcours des 30 derniers soleils :
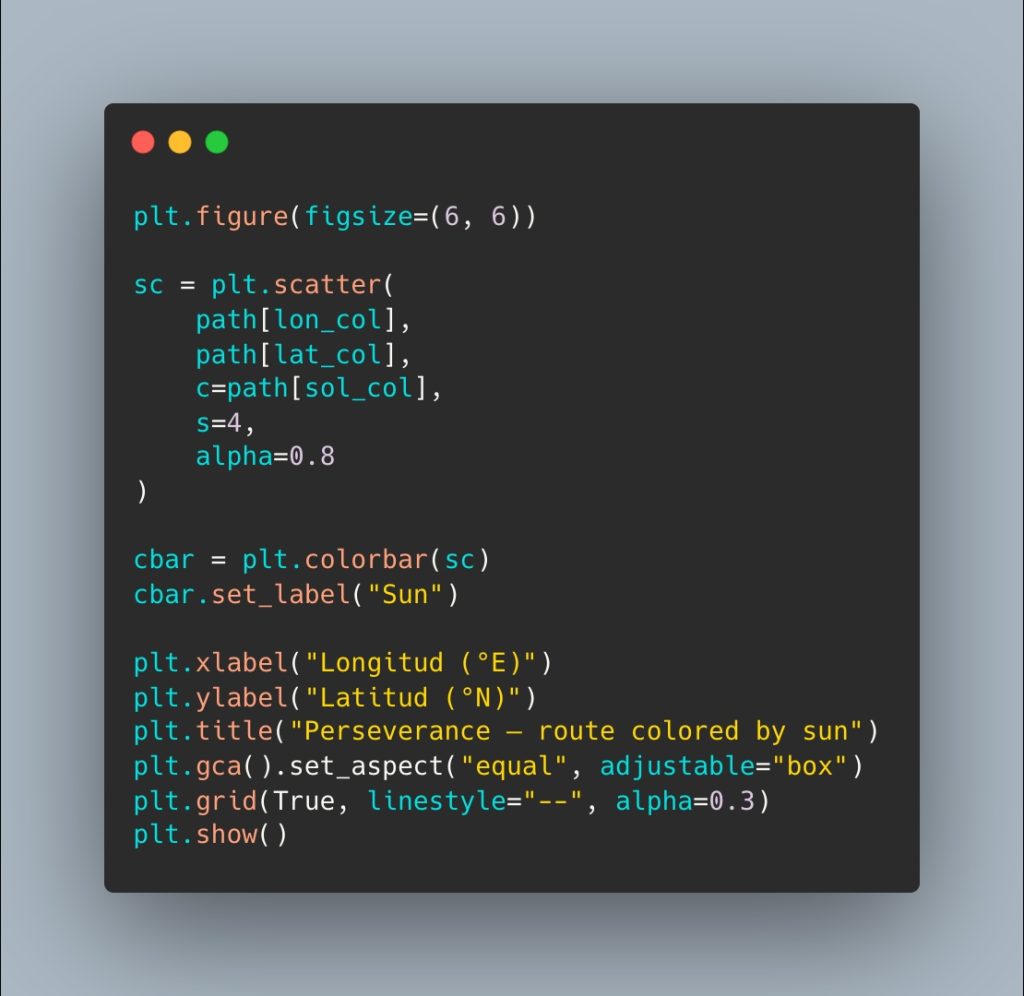
Grâce à un graphique en nuage de points et à l’attribution de couleurs, nous pouvons voir la progression de leur parcours :
2️⃣ Mosaïque HiRISE/CTX du cratère Jezero
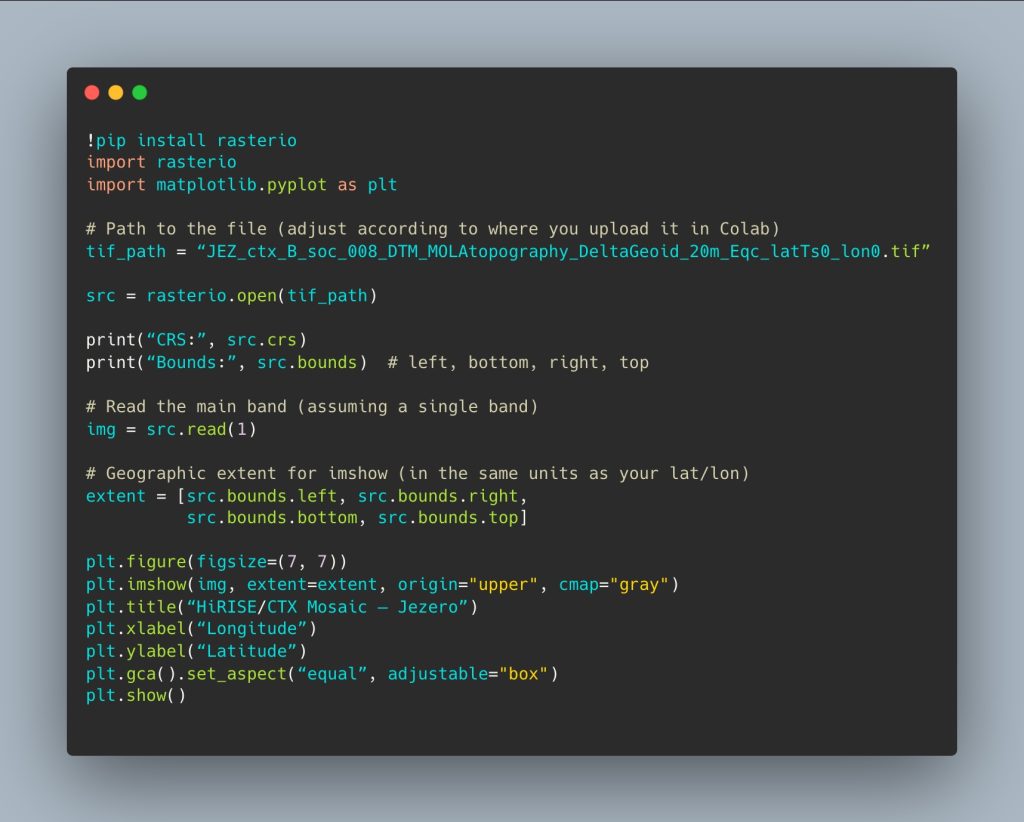
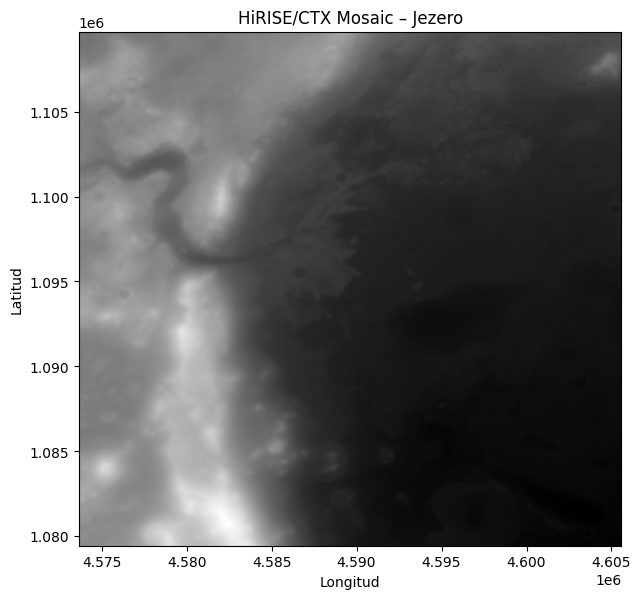
La deuxième donnée est la mosaïque topographique, un fichier image DTM (modèle numérique de terrain) au format TIF de la zone de déplacement de Perseverance :
- Fichier GeoTIFF:
JEZ_ctx_B_soc_008_DTM_MOLAtopography_DeltaGeoid_20m_Eqc_latTs0_lon0.tif - Il s’agit d’un MNT (modèle numérique de terrain) dérivé d’images CTX, avec une résolution de 20 m, projection équirectangulaire martienne (CRS ESRI : 103885).
- Data source: https://pds-geosciences.wustl.edu/missions/mars2020/places.htm
- Nous utilisons la bibliothèque Rasterio pour le traitement du MNT.
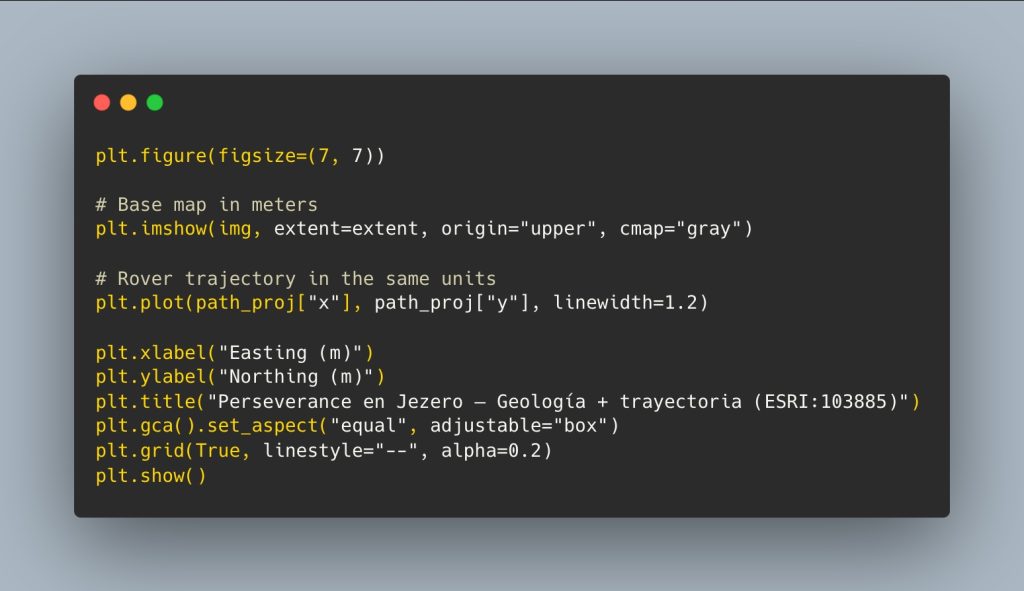
Nous avons maintenant l’image de la carte de base en arrière-plan, et nous pouvons superposer l’itinéraire. Mais avant cela, nous devons ajuster leurs systèmes de localisation, car l’un est en mètres et l’autre en degrés.
3️⃣ ETL géospatial : transformer les coordonnées du rover
Le principal défi technique consiste à aligner les positions du rover avec le raster :
- Le raster est en mètres, projection équirectangulaire martienne (ESRI : 103885).
- Les positions du rover sont exprimées en degrés (lat/long).
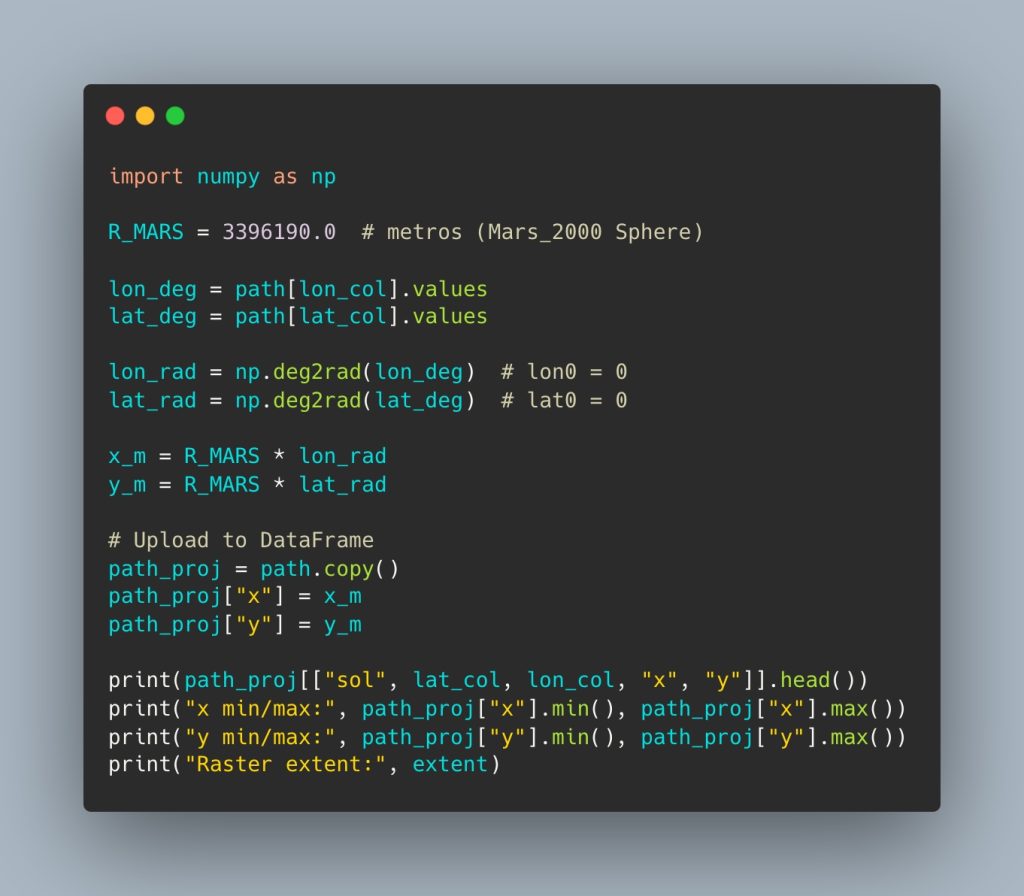
Pour que la trajectoire se superpose correctement au MNT, je transforme les coordonnées à l’aide d’un modèle sphérique de Mars :
Résultats de l’alignement :
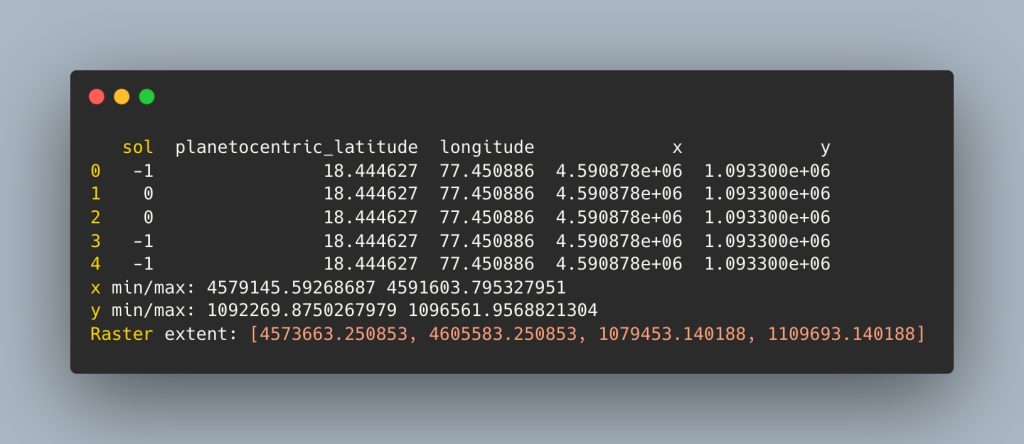
Nous avons désormais la projection de la carte de base en mètres et la trajectoire du rover dans les mêmes unités :
Voyons un exemple avec la visualisation des 30 derniers soleils parcourus par le Rover :
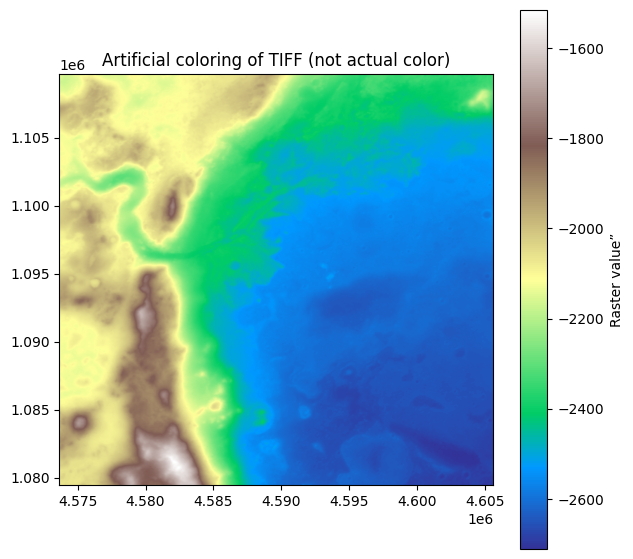
4️⃣ Carte de couleurs martienne : du DTM en gris à une palette « Mars »
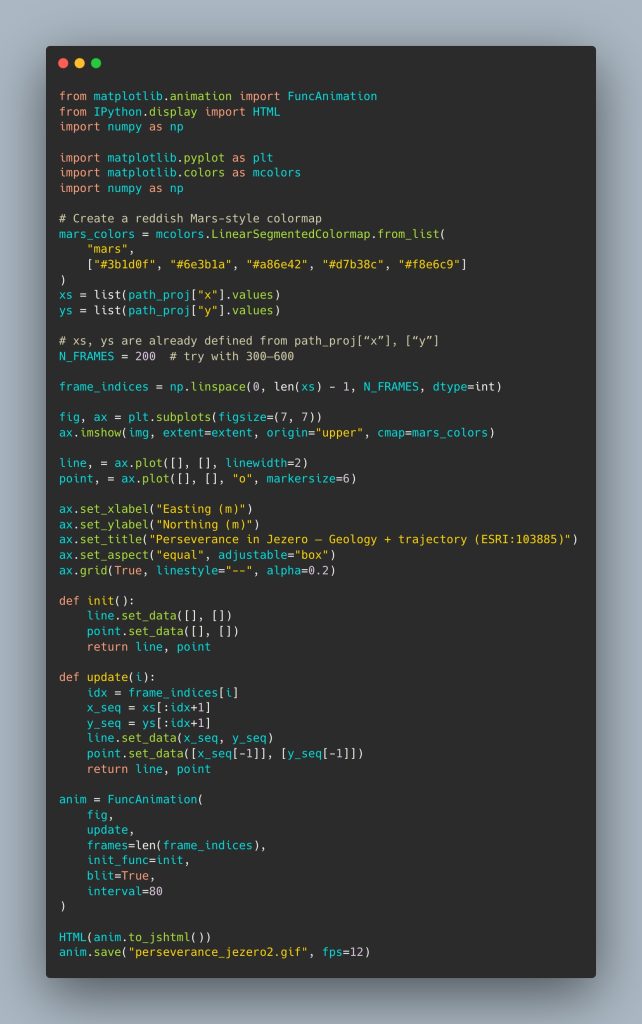
Le DTM original est un raster en niveaux de gris. Comme il n’y a pas de couleur « réelle » dans le fichier (il s’agit d’un modèle d’élévation, pas d’une image RVB), je conçois une carte de couleurs personnalisée inspirée des tons de Mars :
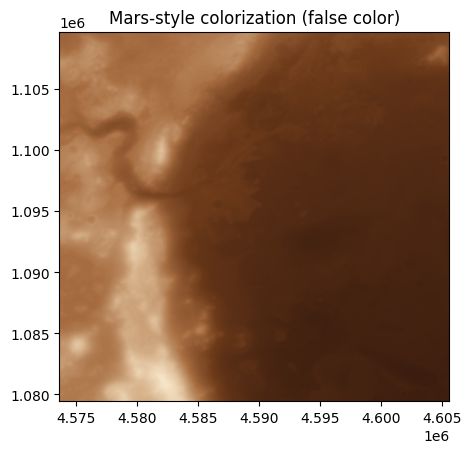
J’essaie de voir une autre variation de la couleur artificielle du fichier image TIF, mais en modifiant la trame, on s’éloigne des couleurs réelles de la planète rouge. En tant qu’exercice de visualisation de la carte d’élévation, c’est intéressant.
5️⃣ Superposition de la trajectoire du rover
Enfin, nous avons créé la carte de couleurs rougeâtre de type Mars comme carte de base, ajusté les images de la projection pour créer une animation au format GIF et en vidéo MP4. Nous pouvons essayer entre 300 et 600 images, mais le rendu est très lent, j’ai décidé de le laisser à 200 pour commencer et l’animation finale n’est pas mal.
Enfin, j’exporte l’animation dans deux formats (Gif et MP4) :
8️⃣ Réflexion : science planétaire + cartographie + narration
Ce flux de travail combine :
- La science planétaire, en travaillant avec des données réelles issues de missions.
- La cartographie et les systèmes de référence, en respectant le CRS martien (ESRI:103885) et en effectuant la projection appropriée.
- L’ingénierie des données, avec un ETL complet depuis le CSV de la NASA jusqu’à la construction d’un ensemble de données projetées.
- La narration visuelle, grâce à la palette personnalisée, l’intégration du MNT et l’animation temporelle.
🔴 Explorer Mars, du lever au coucher du soleil, c’est aussi une façon d’explorer jusqu’où nous pouvons aller avec des données ouvertes et des outils libres.
Ce défi et ce projet ont été mes préférés jusqu’à présent.
#30DayMapChallenge #Process #Mars #Perseverance #Jezero #DataVisualization #Cartographie #GIS #Python #rasterio #Matplotlib #SciencePlanétaire #DataStorytelling